
.JPG)

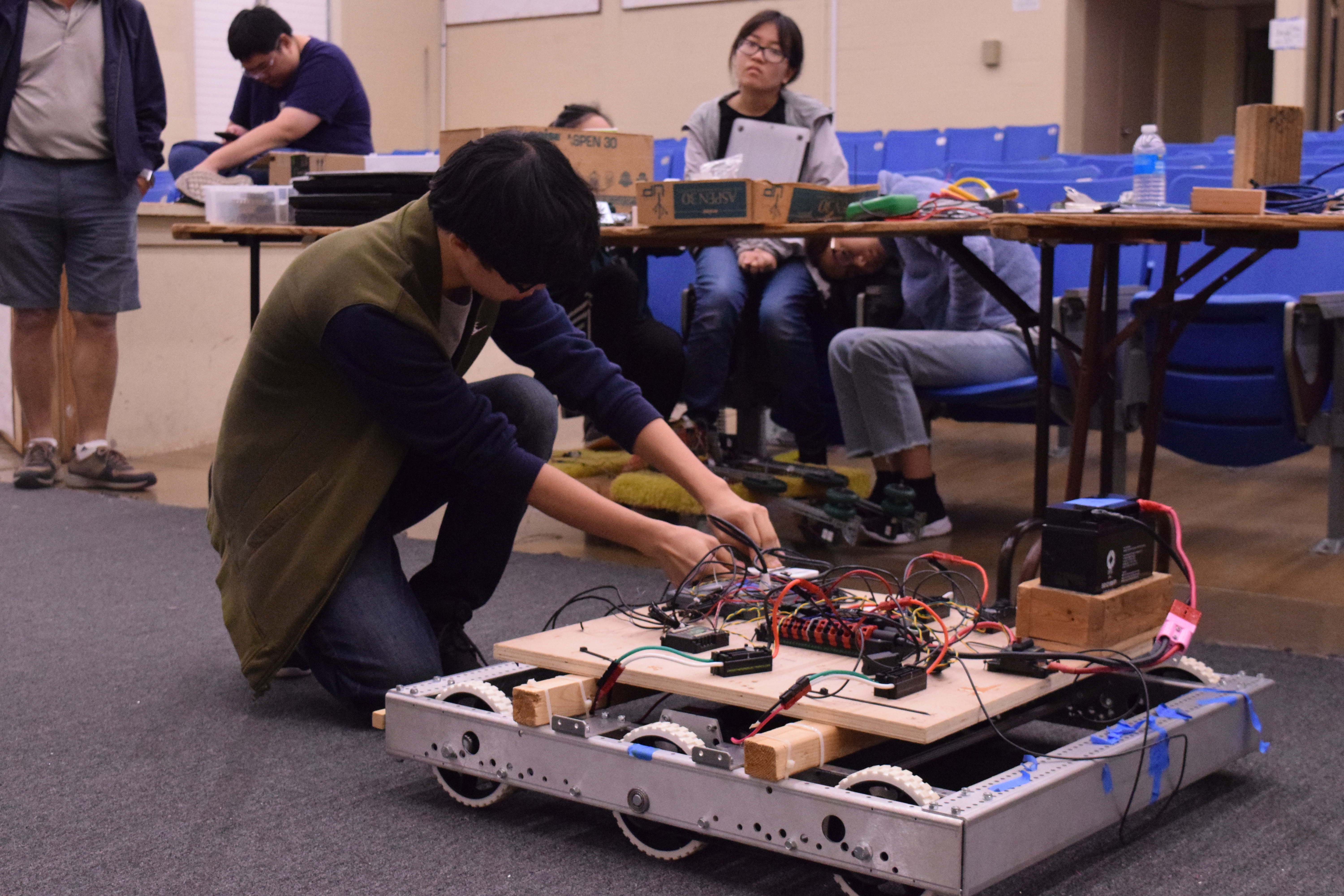

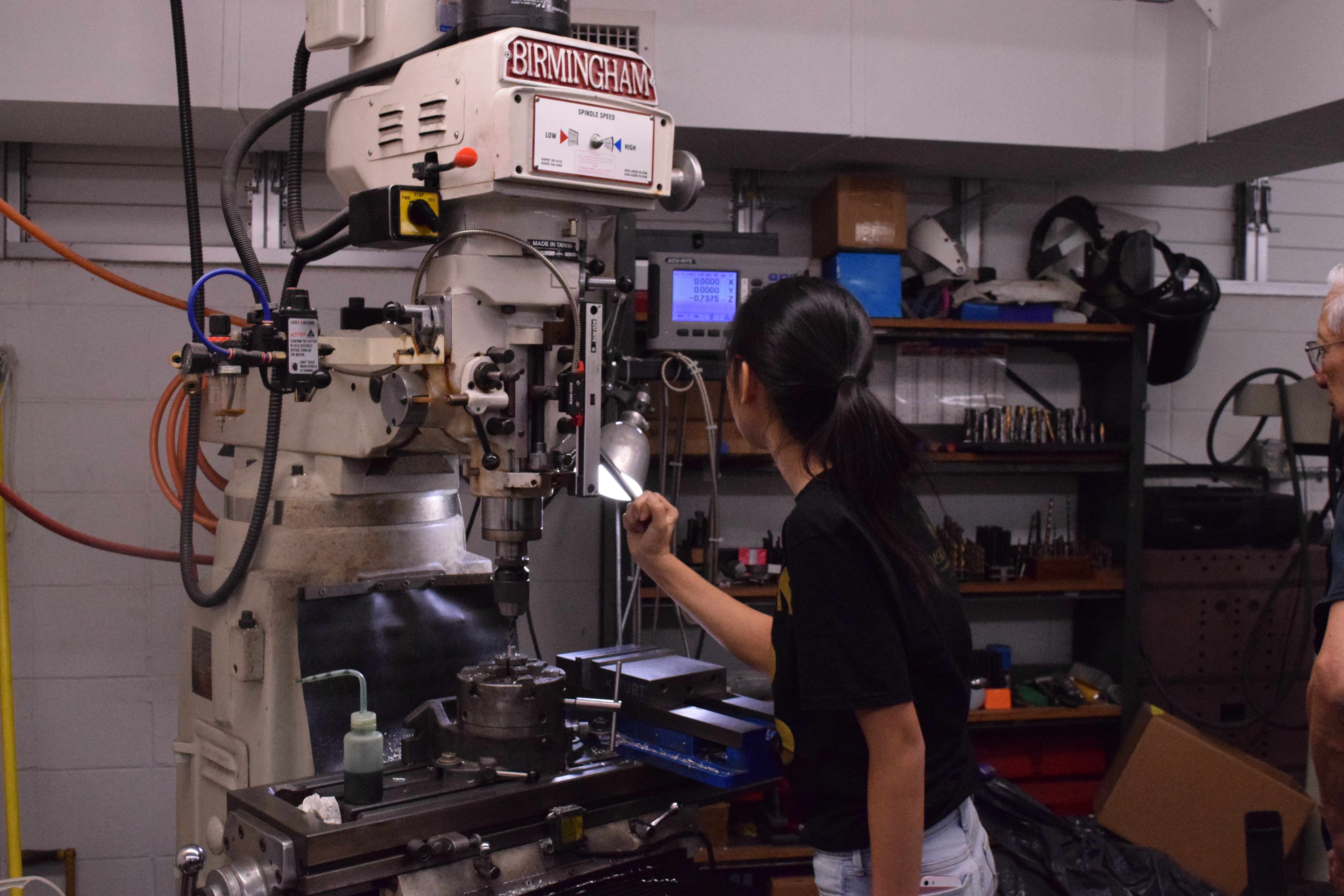

At the start of week 3, electrical robotics members were still working on the swerve drive of the 2017 robot. Others under electrical also tested their proximity sensor, line tracker, and gyro calibration code. The mechanical subgroup continued to machine field parts and also started to prototyping an intake system for this year’s competition.